|
RapidNet
Fast Stochastic MPC for Drinking Water Networks
|
|
RapidNet
Fast Stochastic MPC for Drinking Water Networks
|
TODO Document this class (what is its purpose)
| Engine::Engine | ( | DwnNetwork * | network, |
| ScenarioTree * | scenarioTree, | ||
| SmpcConfiguration * | smpcConfig | ||
| ) |
| network | |
| forecaster |
SmpcConfig from here 
| Engine::Engine | ( | SmpcConfiguration * | smpcConfig | ) |
| network | |
| forecaster |
SmpcConfig from here 
| Engine::~Engine | ( | ) |
Destructor
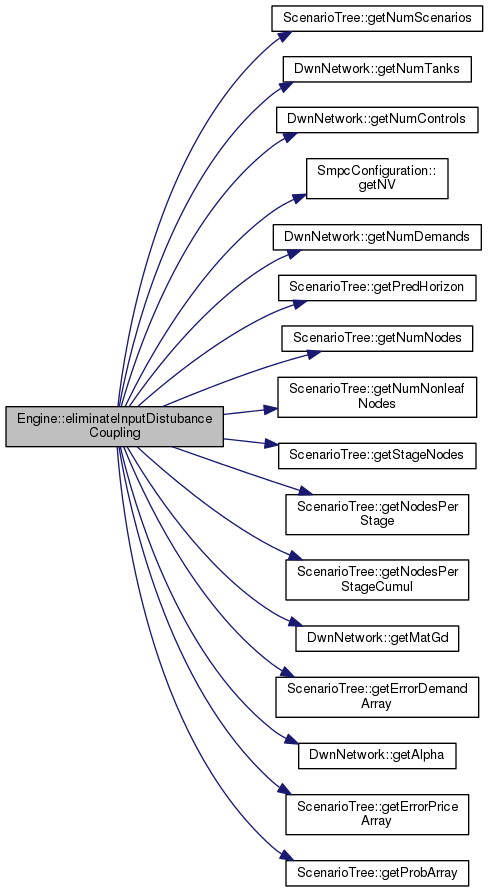
Eliminate input-demand coupling equations
| nominalDemand | demand predicted |
| nominalPrice | price prediction |

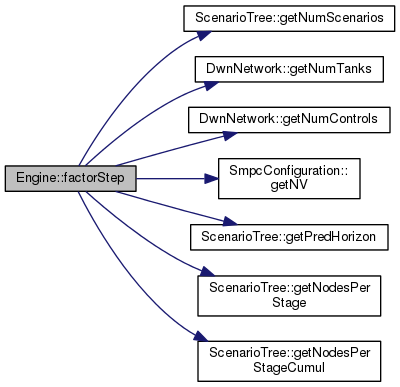
| void Engine::factorStep | ( | ) |
Implements the Factor step that calculates all the constant matrices of the APG algorithm - refer to Appendix B in the paper

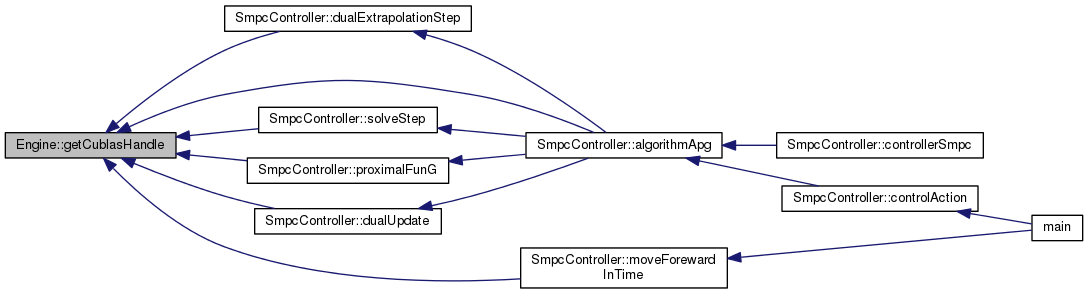
| cublasHandle_t Engine::getCublasHandle | ( | ) |
handle cublasHandle
cublasHandle
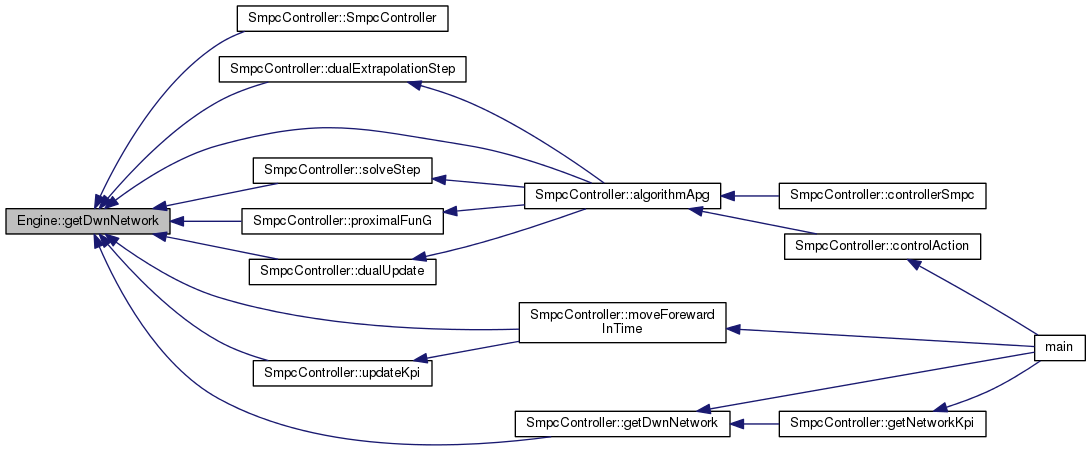
| DwnNetwork * Engine::getDwnNetwork | ( | ) |
pointer to the DWN network
| real_t * Engine::getMatD | ( | ) |
matrix D
| real_t * Engine::getMatF | ( | ) |
matrix F (Factor step)
| real_t * Engine::getMatG | ( | ) |
matrix G (Facotr step)
matrix G (Factor step)
| real_t * Engine::getMatOmega | ( | ) |
matrix Theta
| real_t * Engine::getMatPhi | ( | ) |
previous v reduced control dimensions-—GETTER'S FOR FACTOR MATRICES-— matrix Phi
-—GETTER'S FOR THE FACTOR STEP— matrix Phi
| real_t * Engine::getMatPsi | ( | ) |
matrix Psi
| real_t * Engine::getMatSigma | ( | ) |
matrix Sigma

| real_t * Engine::getMatTheta | ( | ) |
matrix Theta
| real_t ** Engine::getPtrMatD | ( | ) |
pointer matrix D

| real_t ** Engine::getPtrMatF | ( | ) |
pointer matrix F (Factor step)

| real_t ** Engine::getPtrMatG | ( | ) |
pointer matrix G (Factor step)

| real_t ** Engine::getPtrMatOmega | ( | ) |
pointer matrix Omega

| real_t ** Engine::getPtrMatPhi | ( | ) |
pointer matrix Phi

| real_t ** Engine::getPtrMatPsi | ( | ) |
pointer matrix Psi

| real_t ** Engine::getPtrMatSigma | ( | ) |
pointer matrix Sigma

| real_t ** Engine::getPtrMatTheta | ( | ) |
pointer matrix Theta

| real_t ** Engine::getPtrSysMatB | ( | ) |
pointer to Matrix B
| real_t ** Engine::getPtrSysMatF | ( | ) |
pointer to matrix F

| real_t ** Engine::getPtrSysMatG | ( | ) |
pointer to matrix G

| real_t ** Engine::getPtrSysMatL | ( | ) |
pointer to matrix L
| real_t ** Engine::getPtrSysMatLhat | ( | ) |
pointer to matrix Lhat
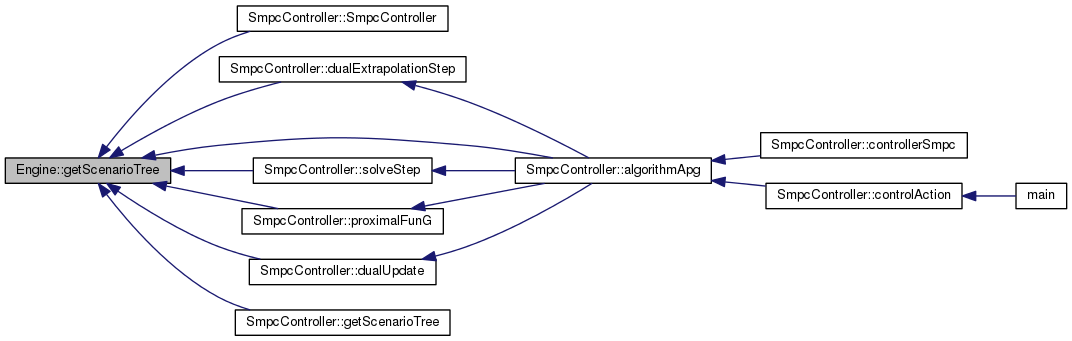
| ScenarioTree * Engine::getScenarioTree | ( | ) |
pointer to the scenario tree
| real_t * Engine::getSysMatB | ( | ) |
System matrix B
—GETTER'S FOR THE SYSTEM MATRICES

| real_t * Engine::getSysMatF | ( | ) |
constraints matrix F
| real_t * Engine::getSysMatG | ( | ) |
constraints matrix G
| real_t * Engine::getSysMatL | ( | ) |
matrix L

| real_t * Engine::getSysMatLhat | ( | ) |
matrix Lhat
| real_t * Engine::getSysUmax | ( | ) |
actuator/cotrol maximum
actuator/control maximum

| real_t * Engine::getSysUmin | ( | ) |
actuator/control minimum

| real_t * Engine::getSysXmax | ( | ) |
state/volume maximum

| real_t * Engine::getSysXmin | ( | ) |
state/volume minimum
-—GETTER'S OF NETWORK CONSTRAINTS-— state/volume minimum

| real_t * Engine::getSysXs | ( | ) |
state/volume safe level

| real_t * Engine::getSysXsUpper | ( | ) |
dummy state/volume safe level

| uint_t * Engine::getTreeAncestor | ( | ) |
Array of ancestor

| real_t * Engine::getTreeErrorDemand | ( | ) |
Array of the error in the demand
| real_t * Engine::getTreeErrorPrices | ( | ) |
Array of the error in the prices
| uint_t * Engine::getTreeLeaves | ( | ) |
Array of the leaves
| uint_t * Engine::getTreeNodesPerStage | ( | ) |
Array of nodes per stage
| uint_t * Engine::getTreeNodesPerStageCumul | ( | ) |
Array of past nodes
| uint_t * Engine::getTreeNumChildren | ( | ) |
Array number of children

| uint_t * Engine::getTreeNumChildrenCumul | ( | ) |
Array of past cumulative children

| real_t * Engine::getTreeProb | ( | ) |
Array of the probability
| uint_t * Engine::getTreeStages | ( | ) |
Array of stages
-—GETTER'S FOR THE SCENARIO TREE-— Array of the stage of the nodes at the tree
| real_t * Engine::getVecBeta | ( | ) |
beta control-distribution elimination

| real_t * Engine::getVecCurrentState | ( | ) |
current state

| real_t * Engine::getVecDemand | ( | ) |
previous demand
| real_t * Engine::getVecE | ( | ) |
e control-disturbance elimination

| real_t * Engine::getVecPreviousControl | ( | ) |
previous control

| real_t * Engine::getVecPreviousUhat | ( | ) |
previous uhat

| real_t * Engine::getVecUhat | ( | ) |
uhat

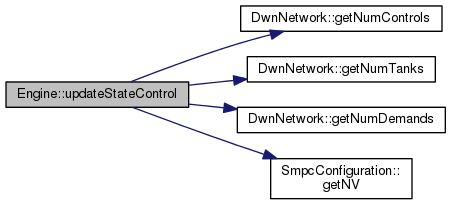
Update the state and control in the device
| currentX | current level of tanks in the system |
| prevU | previous control action |
| prevDemand | previous demand |

 1.8.6
1.8.6

