| SmpcConfiguration::SmpcConfiguration |
( |
string |
pathToFile | ) |
|
Constructor of a SmpcConfiguration entity from a given JSON file.
- Parameters
-
| pathToFile | filename of a JSON file containing a representation of the controller configuration. |
| SmpcConfiguration::~SmpcConfiguration |
( |
| ) |
|
Default destructor to free the memory
| real_t * SmpcConfiguration::getCostW |
( |
| ) |
|
Smooth operation cost matrix
| real_t * SmpcConfiguration::getCurrentX |
( |
| ) |
|
Current state/level of water in the tanks
| real_t * SmpcConfiguration::getMatL |
( |
| ) |
|
Affine space representation for the control-disturbance equality
| real_t * SmpcConfiguration::getMatLhat |
( |
| ) |
|
matrix to calculate the particular solution
| real_t * SmpcConfiguration::getMatPrcndDiag |
( |
| ) |
|
Diagonal preconditioner used
| uint_t SmpcConfiguration::getMaxIterations |
( |
| ) |
|
Get the maximum iterations number of iterations
| uint_t SmpcConfiguration::getND |
( |
| ) |
|
| uint_t SmpcConfiguration::getNU |
( |
| ) |
|
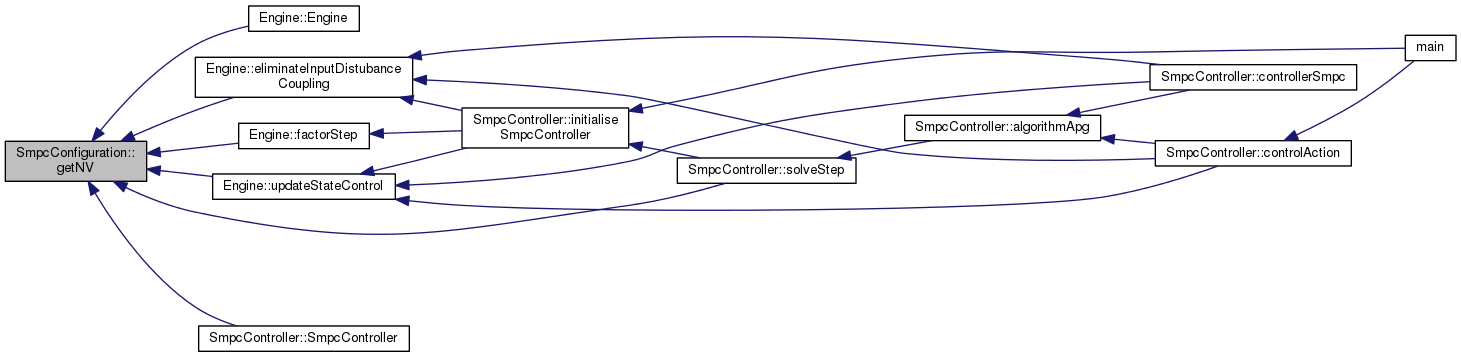
| uint_t SmpcConfiguration::getNV |
( |
| ) |
|
Reduced dimension of the control after eliminating the control-disturbance equality
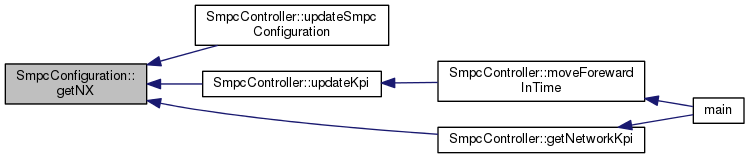
| uint_t SmpcConfiguration::getNX |
( |
| ) |
|
—GETTER'S FOR CONTROLLER CONFIGURATION— Dimension of the state
| string SmpcConfiguration::getPathToControllerConfig |
( |
| ) |
|
| string SmpcConfiguration::getPathToForecaster |
( |
| ) |
|
| string SmpcConfiguration::getPathToNetwork |
( |
| ) |
|
| string SmpcConfiguration::getPathToScenarioTree |
( |
| ) |
|
| real_t SmpcConfiguration::getPenaltySafety |
( |
| ) |
|
Weight that penalise the safety volume of the tank
| real_t SmpcConfiguration::getPenaltyState |
( |
| ) |
|
Weight that penalise the constraints on the tank level
| real_t * SmpcConfiguration::getPrevDemand |
( |
| ) |
|
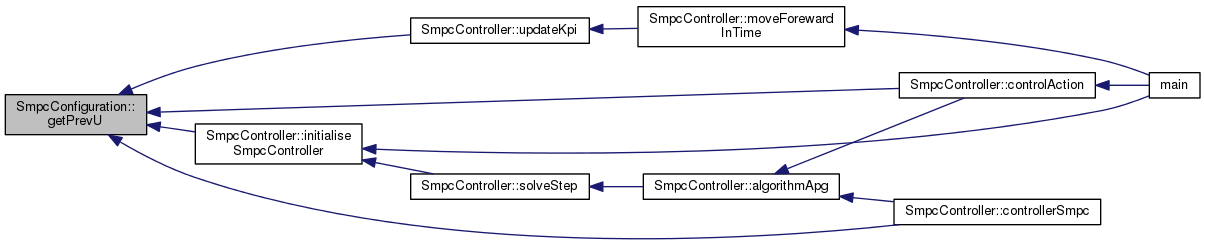
| real_t * SmpcConfiguration::getPrevU |
( |
| ) |
|
Previous control/actuators for the valves and pumps
| real_t SmpcConfiguration::getStepSize |
( |
| ) |
|
| void SmpcConfiguration::setCurrentState |
( |
| ) |
|
SETTER'S FOR THE CONTROLLER CONFIGURATION OBJECT
| void SmpcConfiguration::setCurrentState |
( |
real_t * |
state | ) |
|
update the level in the tanks
- Parameters
-
| void SmpcConfiguration::setPreviousControl |
( |
| ) |
|
| void SmpcConfiguration::setPreviousControl |
( |
real_t * |
control | ) |
|
update the previous control actions
- Parameters
-
| control | previous control action |
| void SmpcConfiguration::setPreviousDemand |
( |
| ) |
|
| void SmpcConfiguration::setpreviousdemand |
( |
real_t * |
demand | ) |
|
update the previous demand
- Parameters
-
The documentation for this class was generated from the following files:















 1.8.6
1.8.6

